-
-
-
Tổng tiền thanh toán:
-
KIẾN THỨC VỀ ENCODER
Ngày đăng 22/06/2023

Encoder là gì?
Định nghĩa Encoder
Nói chung, encoder là một thiết bị hoặc quy trình được sử dụng để chuyển đổi dữ liệu từ một định dạng sang định dạng khác. Trong việc xác định vị trí, encoder là một thiết bị có thể phát hiện và chuyển đổi chuyển động cơ khích thành tín hiệu đầu ra tương tự hoặc số hóa. Cụ thể hơn, nó đo lường vị trí, trong khi vận tốc, gia tốc và hướng có thể được suy ra từ vị trí trong cả chuyển động tuyến tính và xoay.
Các chức năng khác nhau của các encoder xuất phát từ nguyên lý hoạt động vật lý, tín hiệu đầu ra, giao thức truyền thông, v.v. khác nhau.
Encoder tuyến tính và xoay
Chúng ta phân loại các encoder dựa trên loại chuyển động và phân biệt giữa hai loại: tuyến tính và xoay. Encoder tuyến tính được lắp đặt phía trên thanh từ từ tính, và khi thanh di chuyển, encoder đọc khoảng cách đã di chuyển. Nếu bạn cần đo lường quay, encoder xoay có thể được lắp đặt ở cuối trục dưới dạng biến thể trên trục hoặc ngoài trục. Cả hai loại thường được sử dụng trong động cơ điện, vì chúng theo dõi vị trí của trục quay và đo góc quay đã hoàn thành. Biến thể trên trục được đặt ở đỉnh của trục và nam châm được gắn vào trục quay. Biến thể ngoài trục là một encoder thông qua lỗ, đặc biệt thích hợp cho các ứng dụng khi cáp phải được đi qua vòng được cố định xung quanh trục và encoder được đặt ngoài trục (ngoài trục = thông qua lỗ). Các vòng có thể được từ tính hóa theo trục hoặc theo phương hướng tia.
Encoder tăng dần và encoder tuyệt đối
Một phân loại rất phổ biến của các encoder dựa trên nguyên lý mã hóa. Sự khác biệt giữa encoder tăng dần và encoder tuyệt đối có thể được xem như sự khác biệt giữa một đồng hồ bấm giờ và một đồng hồ bình thường. Một đồng hồ bấm giờ đo thời gian tương đối trôi qua từ thời điểm bắt đầu đến thời điểm kết thúc, vì vậy bạn có thể đọc thời gian bằng cách cộng thêm giá trị thời gian đã trôi qua. Một đồng hồ bình thường, ngược lại, hiển thị thời gian chính xác hiện tại trong một ngày.
Tương tự như một đồng hồ bấm giờ, một encoder tăng dần chỉ ra vị trí tương đối và hướng chuyển động bằng cách thêm các xung tăng dần vào vị trí khởi đầu đã biết. Một encoder tuyệt đối có thể được so sánh với một đồng hồ, vì nó đọc mẫu từ từ tính duy nhất của một thanh hoặc vòng và do đó biết vị trí tuyệt đối.
Độ phân giải, độ chính xác và tính lặp lại của Encoder: Sự khác biệt là gì?
Độ phân giải của Encoder
Độ phân giải là sự di chuyển nhỏ nhất mà encoder có thể phát hiện được. Độ phân giải được đo theo cách khác nhau tùy thuộc vào loại encoder:
Trong trường hợp của encoder tuyến tính, độ phân giải là độ dài của một bước đo. Thông thường nó được biểu thị bằng µm và tính toán như độ dài của cực (µm) chia cho hệ số nội suy. Trong các ứng dụng in ấn, nó thường được biểu thị dưới dạng DPI (chấm trên mỗi inch).

Độ phân giải của một encoder xoay ( rotary encoder ) có thể được biểu thị bằng giây cung, phút cung, độ, grad hoặc radian. Đối với một encoder xoay tuyệt đối ( absolute rotary encoder ), độ phân giải là số đoạn hoặc đơn vị đo trong một vòng quay, ví dụ: độ phân giải 13 bit của một encoder xoay tuyệt đối có nghĩa là có 213 = 8192 bước trong một vòng quay đầy đủ 360°. Encoder xoay tăng dần xác định độ phân giải bằng PPR (xung trên mỗi vòng quay) và CPR (đếm trên mỗi vòng quay). PPR chỉ ra một xung tín hiệu từ cạnh tăng lên cạnh tăng tiếp theo, trong khi CPR đánh dấu cạnh tăng và cạnh suy giảm trên cả hai kênh. CPR được thực hiện bằng cách nhân PPR lên bốn điện tử.

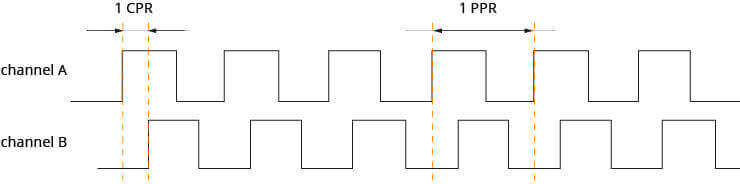
Hình minh họa của một CPR và PPR.
Độ phân giải có thể thuộc vào các danh mục khác nhau, đại diện cho:
Đối với encoder tuyến tính:
- Độ phân giải cao: dưới 100 nm
- Độ phân giải trung bình: 200 nm - 10 µm
- Độ phân giải thấp: trên 50 µm
Đối với encoder xoay:
- Độ phân giải cao: trên 18 bit
- Độ phân giải trung bình: 13 bit - 17 bit
- Độ phân giải thấp: dưới 12 bit
Encoder được lựa chọn nên có độ phân giải bằng hoặc tốt hơn yêu cầu của ứng dụng.
Độ chính xác
Độ chính xác là đo lường mức độ gần giá trị đầu ra so với vị trí thực tế. Đó là sự sai lệch giữa vị trí thực tế và vị trí được báo cáo bởi encoder, hoặc nói một cách ngắn gọn, là lỗi tối đa của các đo lường của chúng ta.
Độ chính xác của một encoder là sự kết hợp giữa độ chính xác của thanh và các lỗi do đầu đọc gây ra. Đối với encoder xoay, nó thường được biểu thị bằng giây cung hoặc độ. Đơn vị phổ biến nhất để chỉ định độ chính xác của encoder tuyến tính là µm trên mỗi đơn vị chiều dài của thanh (µm/m). Lưu ý rằng độ phân giải cao không tự động dẫn đến độ chính xác cao hơn.
Tính lặp lại
Tính lặp lại là sự khác biệt tối đa giữa các đo lường khác nhau được thực hiện tại cùng một vị trí thực tế.
Tính lặp lại một chiều là sự khác biệt trong vị trí được báo cáo của cùng một điểm vật lý từ nhiều đo lường được thực hiện trong cùng một hướng và trong cùng điều kiện. Nhiễu điện tử, biến đổi nhiệt độ và quá trình lão hóa của các thành phần gây ra encoder báo cáo các giá trị khác nhau của cùng một vị trí theo thời gian. Tính lặp lại thường không được nêu rõ nhưng được bao gồm trong thông số độ chính xác. Như một quy tắc chung, tính lặp lại thường tốt hơn (nhỏ hơn) khoảng 5-10 lần so với độ chính xác của một encoder cụ thể.
Tính lặp lại hai chiều là sự khác biệt trong vị trí được báo cáo của cùng một điểm vật lý từ một số đo lường khi di chuyển theo hướng ngược lại và trong cùng điều kiện.
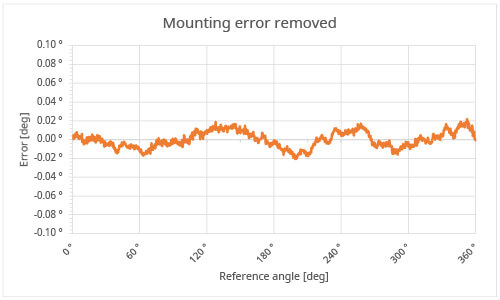
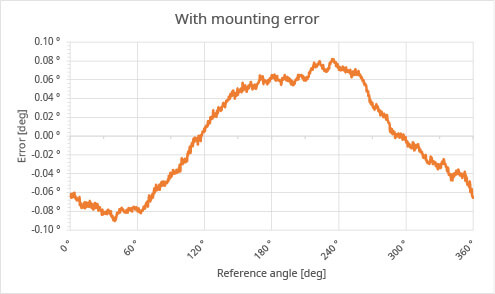
Một hệ thống có thể rất lặp lại, nhưng vẫn không đủ chính xác. Sự khác biệt giữa độ chính xác và tính lặp lại được thể hiện trong Hình 6. Mặc dù tính lặp lại tốt không nhất thiết có nghĩa là độ chính xác tốt, tính lặp lại là thông số quan trọng nhất của encoder đối với nhiều ứng dụng, ví dụ: điều khiển chuyển động lặp lại của tay robot.

Sự khác biệt giữa độ chính xác và tính lặp lại.
Cách chọn một encoder
Lựa chọn một encoder phù hợp cho ứng dụng của bạn có thể là một nhiệm vụ căng thẳng. Với nhiều tùy chọn đầu ra, loại đọc và thiết kế thân encoder để lựa chọn, làm sao để có được cảm biến tốt nhất cho ứng dụng của mình?

BƯỚC 1: CHỌN LOẠI ENCODER
- Loại chuyển động:
- Tuyến tính
- Xoay
Encoder tuyến tính di chuyển dọc hoặc vòng và encoder xoay xoay quanh trục của nó.
- Nguyên tắc mã hóa:
- Tăng dần
- Tuyệt đối
Sự khác biệt giữa encoder tăng dần và encoder tuyệt đối tương tự như sự khác biệt giữa một đồng hồ bấm giờ và một đồng hồ bình thường.
- Nguyên tắc hoạt động:
- Nam châm
- Quang học
- Từ tính
- Laser
Vị trí của encoder có thể được đo bằng các nguyên tắc vật lý khác nhau. Thông tin có thể được truyền từ cơ cấu tới đầu đọc qua tia sáng, dòng điện, trường từ, tự cảm, v.v.
BƯỚC 2: XÁC ĐỊNH THÔNG SỐ CỦA ENCODER
- Độ phân giải:
- Cao
- Trung bình
- Thấp
Độ phân giải là chuyển động nhỏ nhất mà encoder có thể phát hiện. Nó được đo theo cách khác nhau tùy thuộc vào loại encoder.
- Độ chính xác: Sự sai lệch giữa vị trí thực tế và vị trí đọc được từ encoder.
- Tính lặp lại:
Sự khác biệt trong vị trí được báo cáo của cùng một điểm vật lý từ nhiều đo lường khi di chuyển cùng một hướng trong cùng điều kiện.
- An toàn:
- Dự phòng
- SIL (Safety Integrity Level)
- Khác
- Giao diện
- Kích thước
- Môi trường (tốc độ, nhiệt độ, bảo vệ IP, áp suất, kháng hóa chất...)
BƯỚC 3: QUYẾT ĐỊNH VỀ CÁC TÍNH NĂNG BỔ SUNG CỦA ENCODER
- Tự hiệu chỉnh
- Chẩn đoán (LED, phần mềm)
- Thiết lập lại
- Phạm vi:
- Single-turn
- Multi-turn
Với encoder single-turn, các mã đầu ra được lặp lại sau mỗi vòng quay của trục encoder. Với encoder tuyệt đối multi-turn, đầu ra là duy nhất cho mỗi vị trí trục ở mỗi vòng quay lên đến một số vòng quay nhất định (ví dụ: 4096).
Có nhiều loại encoder, dùng cho các mục đích, ứng dụng và người dùng cuối khác nhau.